In June 2019 I started a new role as a software engineer at a startup called Cachecash. Today is probably the last day of payroll there, and as is my usual practice, I’m going to reflect back on my time there. Less commonly, I’m going to do so in public, as we’re about to open the code (yay), and its not a mega-corporation with everything shuttered up (also yay).
Framing
This is intended to be a blameless reflection on what has transpired. Blameless doesn’t mean inaccurate; but it means placing the focus on the process and system, not on the particular actor that happened to be wearing the hat at the time a particular event happened. Sometimes the system is defined by the actors, and in that case – well, I’ll let you draw your own conclusions if you encounter that case.
A retrospective that we can’t learn from is useless. Worse than useless, because it takes time to write and time to read and that time is lost to us forever. So if a thing is a particular way, it is going to get said. Not to be mean, but because false niceness will waste everyone’s time. Mine and my ex-colleagues whose time I respect. And yours, if you are still reading this.
What was Cachecash
Cachecash was a startup – still is in a very technical sense, corporation law being what it is. But it is still a couple of code bases – and a nascent open source project (which will hopefully continue) – built to operationalise and productise this research paper that the Cachecash founders wrote.
What it isn’t anymore is a company investing significant amounts of time and money in the form of engineering in making code, to make those code bases better.
Cachecash was also a team of people. That obviously changed over time, but at the time I write this it is:
- Ghada
- Justin
- Kevin
- Marcus
- Petar
- Robert
- Scott
And we’re all pretty fantastic, if you ask me :).
Technical overview
The CAPNet paper that I linked above doesn’t describe a product. What it describes is a system that permits paying caches (think squid/varnish etc) for transmitting content to clients, while also detecting attempts by such caches to claim payment when they haven’t transmitted, or attempting to collude with a client to pretend to overtransmit and get paid that way. A classic incentives-aligned scheme.
Note that there is no blockchain involved at this layer.
The blockchain was added into this core system as a way to build a federated marketplace – the idea was that the blockchain provided a suitable substrate for negotiating the purchase and sale of contracts that would be audited using the CAPNet accounting system, the payments could be micropayments back onto the blockchain, and so on – we’d avoid the regular financial system, and we wouldn’t be building a fragile central system that would prevent other companies also participating.
Miners would mine coins, publishers would buy coins then place them in escrow as a promise to pay caches to deliver content to clients, and a client would deliver proof of delivery back to the cache which would then claim payment from the publisher.
Technical Challenges
There were a few things that turned up as significant issues. In no particular order:
The protocol
The protocol itself adds additional round trips to multiple peers – in its ‘normal’ configuration the client ends up running (web- for browers) GRPC connections to 5 endpoints (with all the normal windowing concerns, but potentially over QUIC), and then gets chunks of content in batches (concurrently) from 4 of the peers, runs a small crypto brute force operation on the combined result, and then moves onto the next group of content. This should be sounding suspiciously like TCP – it is basically a window management problem, and it has exactly the same performance management problems – fast start, maximum window size, how far to reduce it when problems are suffered. But accentuated: those 4 cache peers can all suffer their own independent noise problems, or be hostile. But also, they can also suffer correlated problems: they might all be in the same datacentre, or be all run by a hostile actor, or the client might be on a hostile WiFi link, or the client’s OS/browser might be hostile. Lets just say that there is a long, rich road for optimising this new protocol to make it fast, robust, reliable. Much as we have taken many years to make HTTP into QUIC, drawing upon techniques like forward error correction rather than retries – similar techniques will need to be applied to give this protocol similar performance characteristics. And evolving the protocol while maintaining the security properties is a complicated task, with three actors involved, who may collude in various ways.
An early performance analysis I did on the go code implementation showed that the brute forcing work was a bottleneck because while the time (once optimise) per second was entirely modest for any small amount of data, the delay added per window element acts as a brake on performance for high capacity low latency links. For a 1Gbps 25ms RTT link I estimated a need for 8 cores doing crypto brute forcing on the client.
JS
Cachecash is essentially implementing a new network protocol. There are some great hooks these days in browsers, and one can hook in and provide streams to things like video players to let them get one segment of video. However, for downloading an entire file – for instance, if one is downloading a full video, it is not so easy. This bug, open for 2 years now, is the standards based way to do it. Even so non-standards based way to do it involves buffering the entire content in memory, oh and reflecting everything through a static github service worker. (You of course host such a static page yourself, but then the whole idea of this federated distributed system breaks down a little).
Our initial JS implementation was getting under 512KBps with all-local servers – part of that was the bandwidth delay product issue mentioned above. Moving to getting chunks of content from each cache concurrently using futures improved that up to 512KBps, but thats still shocking for a system we want to be able to compete with the likes of Youtube, Cloudflare and Akamai.
One of the hot spots turned out to be calculating SHA-256 values – the CAPNet algorithm calculates thousands (it’s tunable, but 8k in the set I was analysing) of independent SHA’s per chunk of received data. This is a problem – in browser SHA routines, even the recent native hosted ones – are slow per SHA. They are not slow per byte. Most folk want to make a small number of SHA calculations. Maybe thousands in total. Not tens of thousands per MB of data received….. So we wrote an implementation of the core crypto routines in Rust WASM, which took our performance locally up to 2MBps in Firefox and 6MBps in Chromium.
It is also possible we’d show up as crypto-JS at that point and be blacklisted as malware!
Blockchain
Having chosen to involve a block chain in the stack we had to deal with that complexity. We chose to take bitcoin’s good bits and run with those rather than either running a sidechain, trying to fit new transaction types into bitcoin itself, or trying to shoehorn our particular model into e.g. Ethereum. This turned out to be a fairly large amount of work : not the core chain itself – cloning the parts of bitcoin that we wanted was very quick. But then layering on the changes that we needed, to start dealing with escrows and negotiating parameters between components and so forth. And some of the operational challenges below turned up here as well even just in developer test setups (in particular endpoint discovery).
Operational Challenges
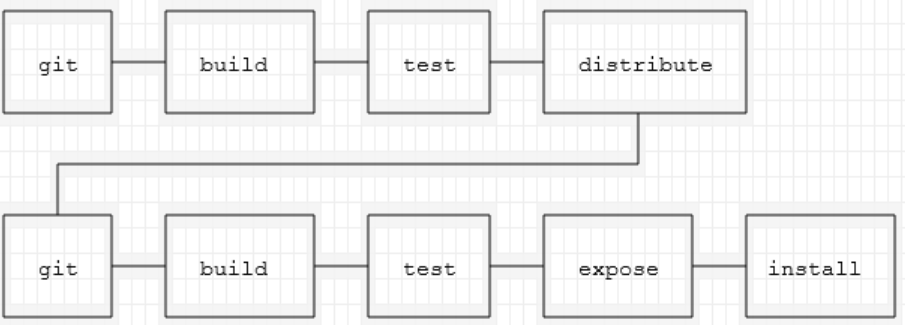
The operational model was pretty interesting. The basic idea was that eventually there would be this big distributed system, a bit-coin like set of miners etc, and we’d be one actor in that ecosystem running some subset of the components, but that until then we’d be running:
- A centralised ledger
- Centralised random number generation for the micropayment system
- Centralised deployment and operations for the cache fleet
- Software update / vetting for the publisher fleet
- Software update / publishing for the JS library
- Some number of seed caches
- Demo publishers to show things worked
- Metrics, traces, chain explorer, centralised logging
We had most of this live and running in some fashion for most of the time I was there – we evolved it and improved it a number of times as we iterated on things. Where appropriate we chose open source components like Jaeger, Prometheus and Elasticsearch. We also added policy layers on top of them to provide rate limiting and anti-spoofing facilities. We deployed stuff in AWS, with EKS, and there were glitches and things to workaround but generally only a tiny amount of time went into that part of it. I think I spent a day on actual operations a month, or thereabouts.
Other parties were then expected to bring along additional caches to expand the network, additional publishers to expand the content accessible via the network, and clients to use the network.
Ensuring a process run by a third party is network reachable by a browser over HTTPS is a surprisingly non-simple problem. We partly simplified it by mandating that they run a docker container that we supplied, but there’s still the chance that they are running behind a firewall with asymmetric ingress. And after that we still need a domain name for their endpoint. You can give every cache a CNAME in a dedicated subdomain – say using their public key as the subdomain, so that only that cache can issue requests to update their endpoint information in DNS. It is all solvable, but doing it so that the amount of customer interaction and handholding is reduced to the bare minimum is important: a user with a fleet of 1000 machines doesn’t want to talk to us 1000 times, and we don’t want to talk to them either. But this was a another bit of this-isn’t-really-distributed-is-it grit in the distributed-ointment.
Adoption Challenges
ISPs with large fleets of machines are in principle happy to sell capacity on them in return for money – yay. But we have no revenue stream at the moment, so they aren’t really incentivised to put effort in, it becomes a matter of principle, not a fiscal “this is 10x better for my business” imperative. And right now, its 10x slower than HTTP. Or more.
Content owners with large amounts of content being delivered without a CDN would like a radically cheaper CDN. Except – we’re not actually radically cheaper on a cost structure basis. Current CDN’s are expensive for their expensive 2nd and third generation products because no-one offers what they offer – seamless in-request edge computing. But that ISP that is contributing a cache to the fleet is going to want the cache paid for, and thats the same cost structure as existing CDNs – who often have a free entry tier. We might have been able to make our network cheaper eventually, but I’m just not sure about the radically cheaper bit.
Content owners who would like a CDN marketplace where the CDN caches are competing with each other – driving costs down – rather than than the CDN operators competing – would absolutely love us. But I rather suspect that those owners want more sophisticated offerings. To be clear, I wasn’t on the customer development team, and didn’t get much in the way of customer development briefings. But things like edge computing workers, where completely custom code can run in the CDN network, adjacent to ones user, are much more powerful offerings than simple static content shipping offerings, and offered by all major CDN’s. These are trusted services – the CAPNet paper doesn’t solve the problem of running edge code and providing proof that it was run. Enarx might go some, or even a long way way to running such code in an untrusted context, but providing a proof that it was run – so that running it can become a mining or mining-like operation is a whole other question. Without such an answer, an edge computing network starts to depend on trusting the caches behaviour a lot more all over again – the network has no proof of execution to depend on.
Rapid adjustment – load spikes – is another possible use case, but the use of the blockchain to negotiate escrows actually seemed to work against our ability to offer that. Akami define load spike in a time frame faster than many block chains can decide that a transaction has actually been accepted. Offchain transactions are of course a known thing in the block chain space but again that becomes additional engineering.
Our use of a new network protocol – for all that it was layered on standard web technology – made it harder for potential content owners to adopt our technology. Rather than “we have 200 local proxies that will deliver content to your users, just generate a url of the form X.Y.Z”, our solution is “we do not trust the 200 local proxies that we have, so you need to run complicated JS in your browser/phone app etc” to verify that the proxies are actually doing their job. This is better in some ways – precisely because we don’t trust those proxies, but it also increases both the runtime cost of using the service, the integration cost adopting the service, and complexity of debugging issues receiving content via the service.
What did we learn?
It is said that “A startup is an organization formed to search for a repeatable and scalable business model.” What did we uncover in our search? What can we take away going forward?
In principle we have a classic two sided market – people with excess capacity close to users want to sell it, and people with excess demand for their content want to buy delivery capacity.
The baseline market is saturated. The market as a whole is on its third or perhaps fourth (depending on how you define things) major iteration of functionality.
Content delivery purchasers are ok with trusting their suppliers : any supply chain fraud happening in this space at the moment is so small no-one is talking about it that I heard about.
Some of the things we were doing don’t seem to have been important to the customers we talked to – I don’t have a great read on this, but in particular, the blockchain aspect seems to have been more important to our long term vision than to the 2-sided market place that we perceived. It would be fascinating to me to validate that somehow – would cache capacity suppliers be willing to trust us enough to sell capacity to us with just the auditing mechanism, without the blockchain? Would content providers be happy buying credit from us rather than from a neutral exchange?
What did I learn?
I think in hindsight my startup muscles were atrophied – it had been some years since Canonical and it took a few months to start really thinking lean-startup again on a personal basis. That’s ok, because I was hired to build systems. But its not great, because I can do better. So number one: think lean-startup and really step up to help with learning and validation.
I levelled up my Go lang skills. That was really nice – Kevin has deep knowledge there, and though I’ve written Go before I didn’t have a good appreciation for style or aesthetics, or why. I do now. Where before I’d say ‘I’m happy to dive in but its not a language I feel I really know’, I am now happy to say that I know Go. More to learn – there always is – but in a good place.
I did a similar thing to my JS skills, but not to the same degree. Having climbed fairly deeply into the JS client – which is written in Typescript, converted its bundling system to webpack to work better with Rust-WASM, and so on. Its still not my go-to place, but I’m much more comfortable there now.
And of course playing with Rust-WASM was pure delight. Markus and I are both Rust afficionados, and having a genuine reason to write some Rust code for work was just delightful. Finding this bug was just a bonus :).
It was also really really nice being back in a truely individual contributor role for a while. I really enjoyed being able to just fix bugs and get on with things while I got my bearings. I’ve ended up doing a bit more leadership – refining of requirements, translating between idea-and-specification and the like recently, but still about 80% of time has been able to be sit-down-and-code, and that really is a pleasant holiday.
What am I going to change?
I’m certainly going to get a new job :). If you’re hiring, hit me up. (If you don’t have my details already, linkedin is probably best).
I’m think there the core thing I need to do is more alignment of the day to day work I’m doing with needs of customer development : I don’t want to take on or take over the customer development role – that will often be done best in person with a customer for startups, and I’m happy remote – but the more I can connect what I’m trying to achieve with what will get the customers to pay us, the more successful any business I’m working in will be. This may be a case for non-vanity metrics, or talking more with the customer-development team, or – well, I don’t know exactly what it will look like until I see the context I end up in, but I think more connection will be important.
And I think the second major thing is to find a better balance between individual contribution and leadership. I love individual contribution, it is perhaps the least stressful and most Zen place to be. But it is also the least effective unless the project has exactly one team member. My most impactful and successful roles have been leadership roles, but the pure leadership role with no individual contribution slowly killed me inside. Pure individual contribution has been like I imagine crack to be, and perhaps just as toxic in the long term.

 A
A